AGV-TRANSPORT
Product Design

September 29 2025

Description
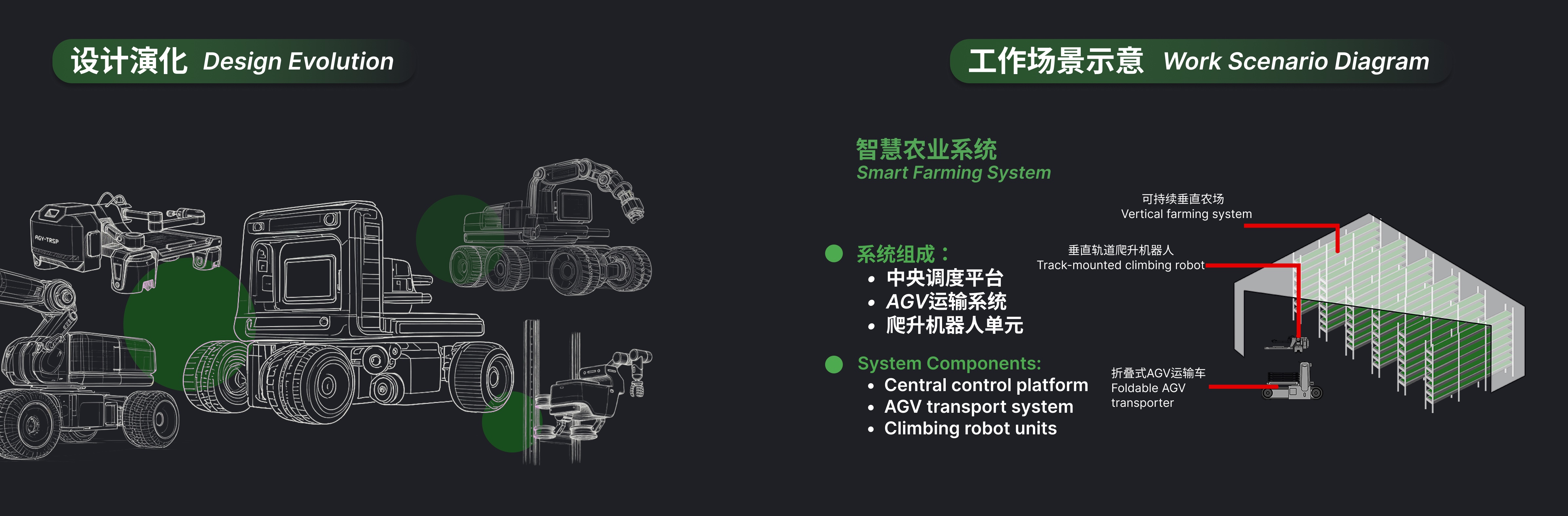
A modular transport system designed for vertical farming, integrating AGV vehicles and climbing robots to enable efficient, automated crop handling.
The system improves operational efficiency, reduces labor dependency, and supports scalable agricultural production through intelligent coordination and adaptive structures.
Outcome
The final design delivers a modular transport system tailored for vertical farming environments, combining AGV vehicles with track-mounted climbing robots to automate crop handling and logistics.
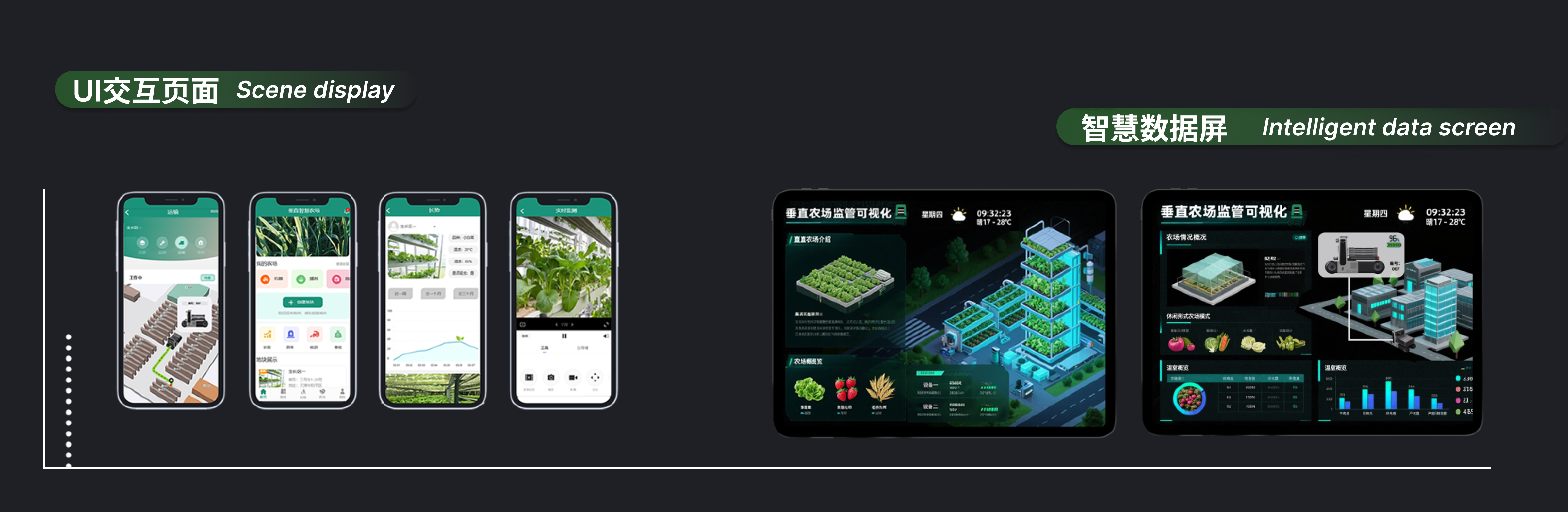
By enabling seamless coordination between multiple devices, the system reduces manual labor, improves operational efficiency, and ensures consistent and safe handling of crops. Its expandable structure adapts to different load conditions, while the integrated control system supports real-time monitoring and task management.
Overall, the project demonstrates a scalable and intelligent approach to agricultural automation, bridging physical product design with system-level thinking.